
FREDA
Fatuous Robotic Experiment in Draconiform Ambulation. A vehicle for learning CAD, electronics, sensing, human interaction, and the power of the absurd.
Prof. Ruzena Bajcsy (EECS, Intro to Robotics) was so taken with FREDA that she arranged for a demonstration video to be produced by the CITRIS institute. The video played on loop in the CITRIS lobby in Sutardja Dai Hall.
What is FREDA?
FREDA is a fully custom robotics platform built around the skeletal form of an iguana. Every component, mechanical, electrical, and software, was designed, built, and integrated by hand.
The project began as a vehicle for learning SolidWorks. It grew into a multi-year platform spanning autonomous navigation, active IR sensing, obstacle avoidance, heartbeat visualization, and computer-vision-based face following.
Her second iteration is now complete.
| CAD | SolidWorks |
| Fabrication | Velleman K8200 FDM (PLA, glow PLA, TPU) |
| Control | Arduino Uno; ESP32S3 (Seeed XIAO) |
| Sensing | IR beacon, Sharp GP2Y0E02A, GP2Y0A41SK0F, heartbeat sensor, camera |
| Lighting | WS2812B + fiber optics (v2); TLC5947 + dome LEDs (v1) |
| Drive | RC car drivetrain, hacked and Arduino-controlled |
| Recognition | UC Berkeley CITRIS; Prof. Ruzena Bajcsy |
How She Was Built
CAD & Chassis Design
Designed FREDA’s skeletal chassis from scratch in SolidWorks, translating iguana anatomy into a manufacturable multi-part assembly. A first foray into CAD, entirely self-directed, resulting in a custom structure inspired by the form and articulation of an iguana skeleton.
3D Printing & Initial Electronics
Built a Velleman K8200 3D printer from a kit, then used it to print FREDA’s chassis in PLA. Installed RGB LED lighting along her spine driven by four Adafruit TLC5947 24-channel 12-bit PWM LED drivers with individually wired 5mm RGB dome LEDs. This wiring-intensive approach directly motivated the cleaner Iteration 2 design, which involved WS2812B dots and fiber-optics.
Drive System, RC Car Hack
Hacked a commercial RC car to serve as FREDA’s drivetrain. Initially retained the car’s existing motor controller, then migrated to an Arduino Uno to enable programmable autonomous behavior. A manual mode-select switch embedded in her spine allowed toggling between RC and autonomous control.
Active Sensing & Autonomous Following
UC Berkeley, Intro to Robotics, Prof. Ruzena Bajcsy
A Pololu IR beacon (56 kHz, 4 detectors, 6in to 15ft range) served as the target. Four IR receivers were embedded in custom PLA flower housings on FREDA’s skull, each oriented 45° from cardinal directions. Adjacent sensors overlapped by exactly 1 degree at the forward axis, creating a narrow precision lock-on zone.
A servo-modified neck let FREDA scan independently of her body, with servo position used to extract absolute heading when locked on. Sharp GP2Y0E02A IR sensors (forward and each side) handled obstacle avoidance. A GP2Y0A41SK0F under her chin provided proportional throttle control for smooth deceleration on approach.

A class-driven addition: The forward nose sensor was later replaced with a heartbeat sensor designed from scratch, in order to learn signal acquisition principles in circuit design.
Ground-Up Refinement
The second iteration is a full redesign informed by everything the first build revealed: cleaner mechanically, dramatically simpler electrically, and significantly more capable. Freda also got a makeover, including two-tone patterned glow-in-the-dark PLA printing for her skull.

// New Skull & Eyes
Redesigned eye assemblies house Seeed XIAO ESP32S3 microcontrollers and camera modules in 2-DOF servo gimbals. Printed in two tones of glow-in-the-dark PLA on a Prusa XL. Eyes track faces independently and in coordination with the neck servo, and will be used to inform her autonomous control algorithm in future.

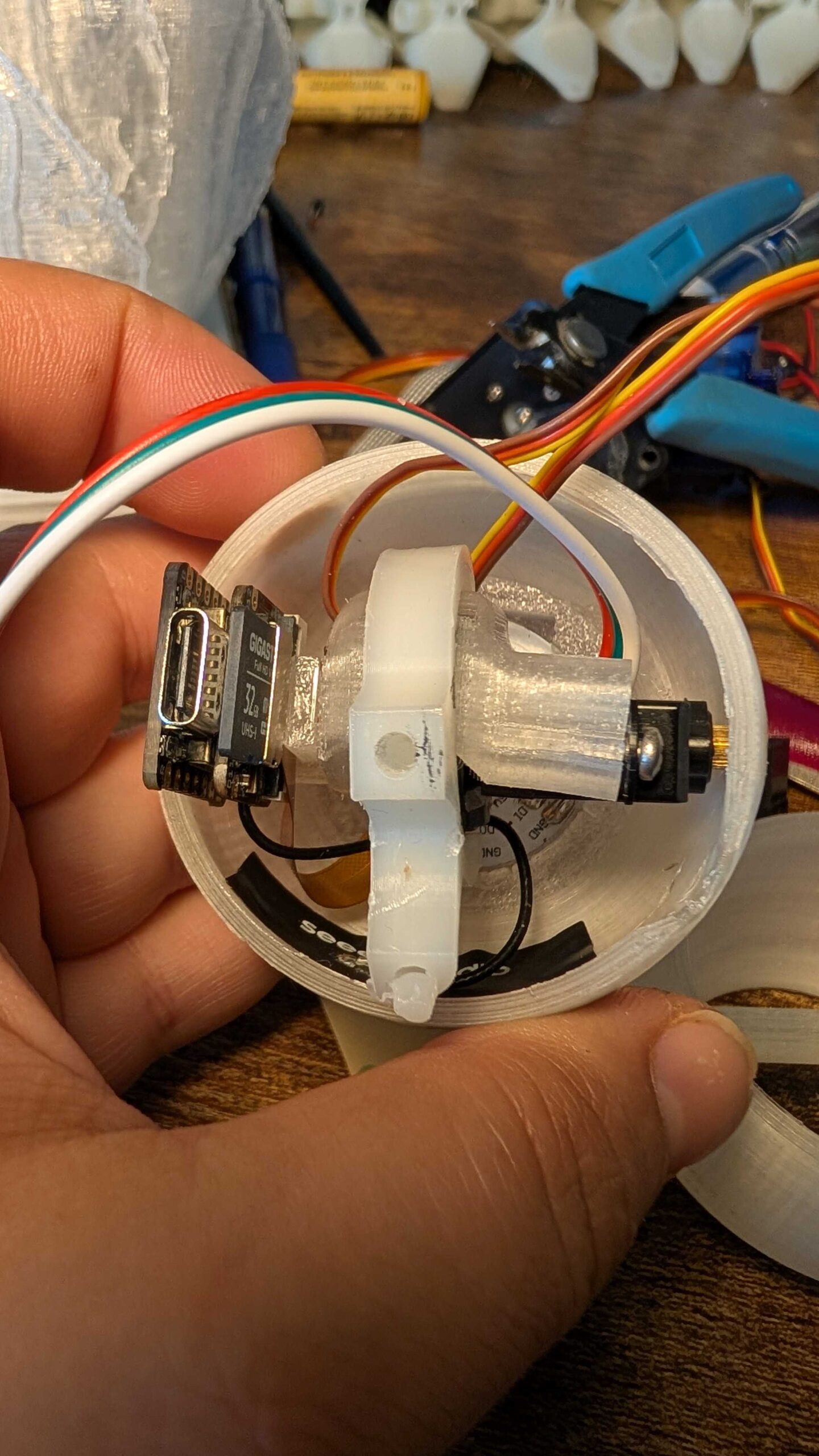
// Eye Electronics
Each eye contains a Seeed XIAO ESP32S3, camera on ribbon cable, WS2812B LED ring, and two micro servos, all within a 3D-printed spherical shell. Wiring harnesses route cleanly into the skull without impinging gimbal movements or straining wires.
// 2-DOF Eye Gimbals
Custom-printed gimbals give each eye two degrees of freedom. Combined with the neck servo’s pan and tilt axes, FREDA’s head and eyes create enough degrees of freedom for face following, obstacle avoidance, and artful character animation.
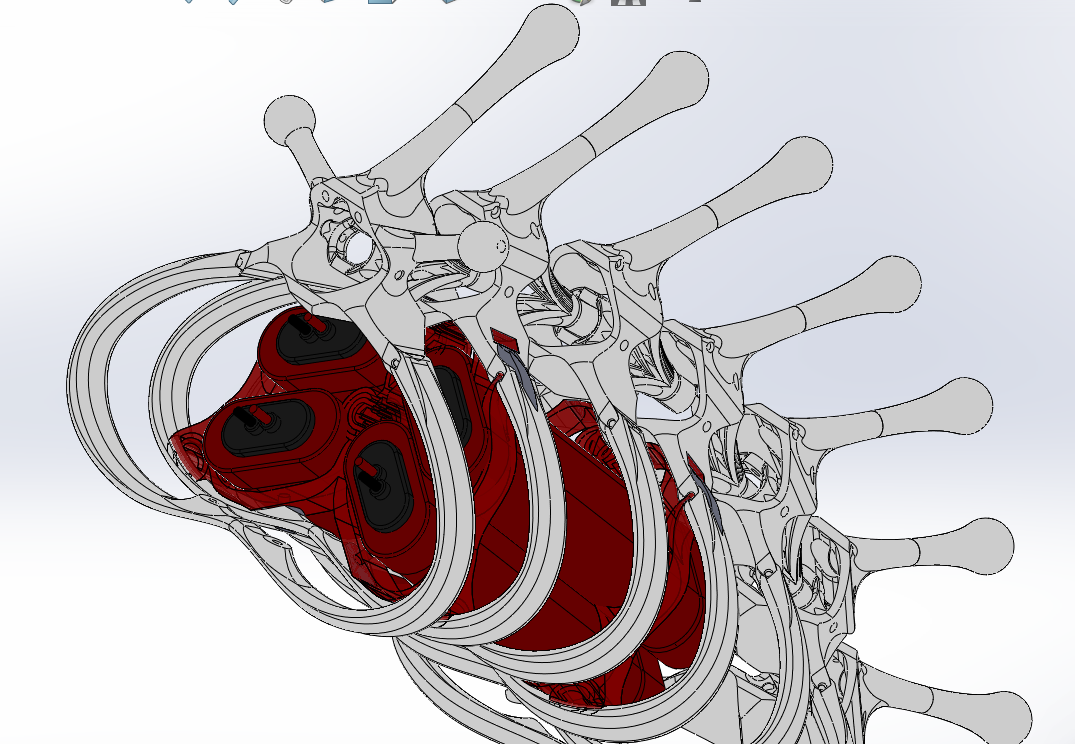
// Battery Chassis (CAD)
The ribcage doubles as a structural battery enclosure. Inner retention features are printed in flexible TPU for a snug, secure fit. Geometry and flexibility of the retention structure was designed to allow for rotation in the X-Y plane while still holding batteries secure, in order to enable more iguana-like movements in future.
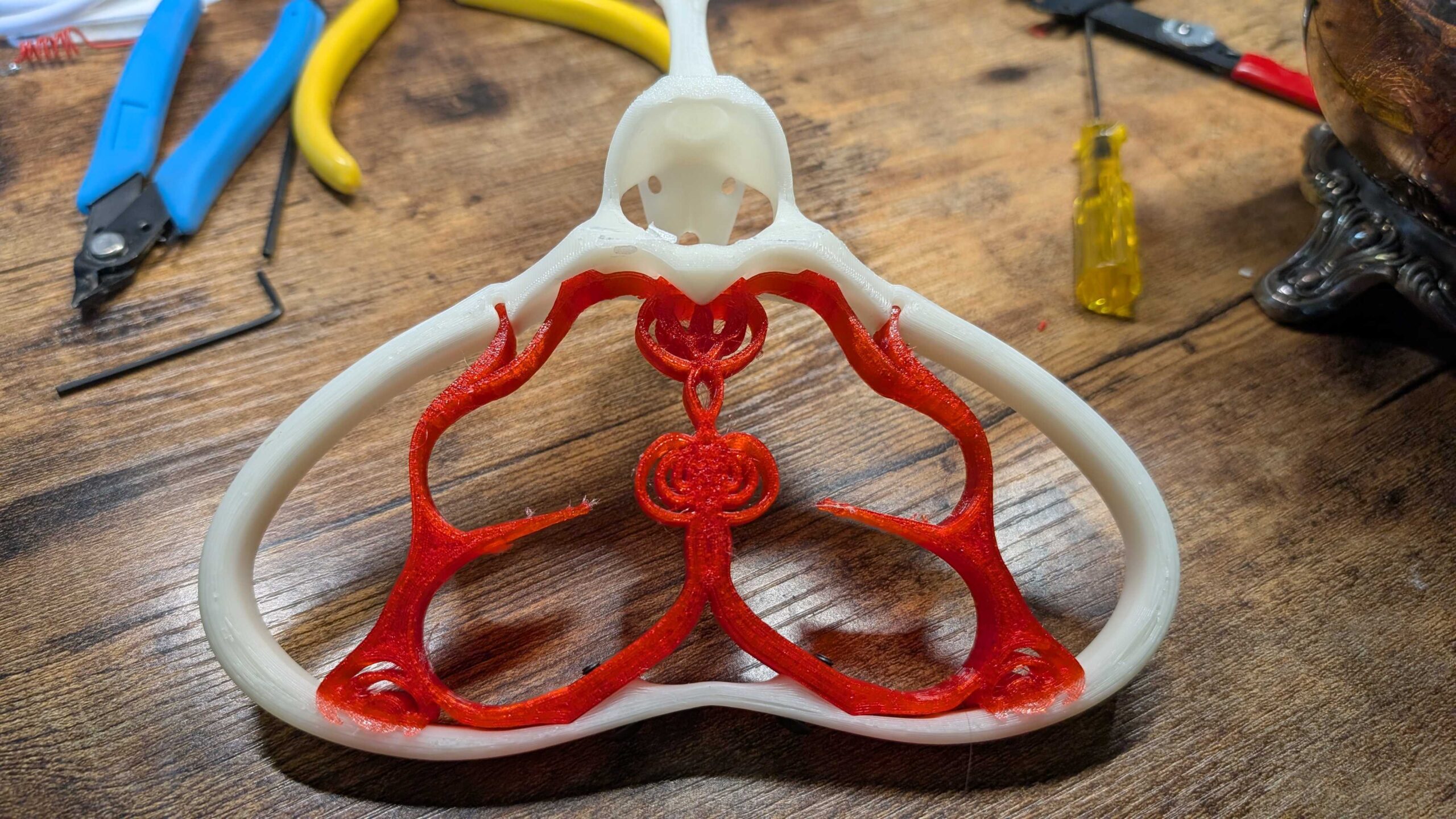
// Battery Chassis (Printed)
Two-filament print: white PLA ribcage with red TPU internal cradle “guts”. Spiral retention features grip batteries securely while remaining easily removable. Both functional and visually striking.
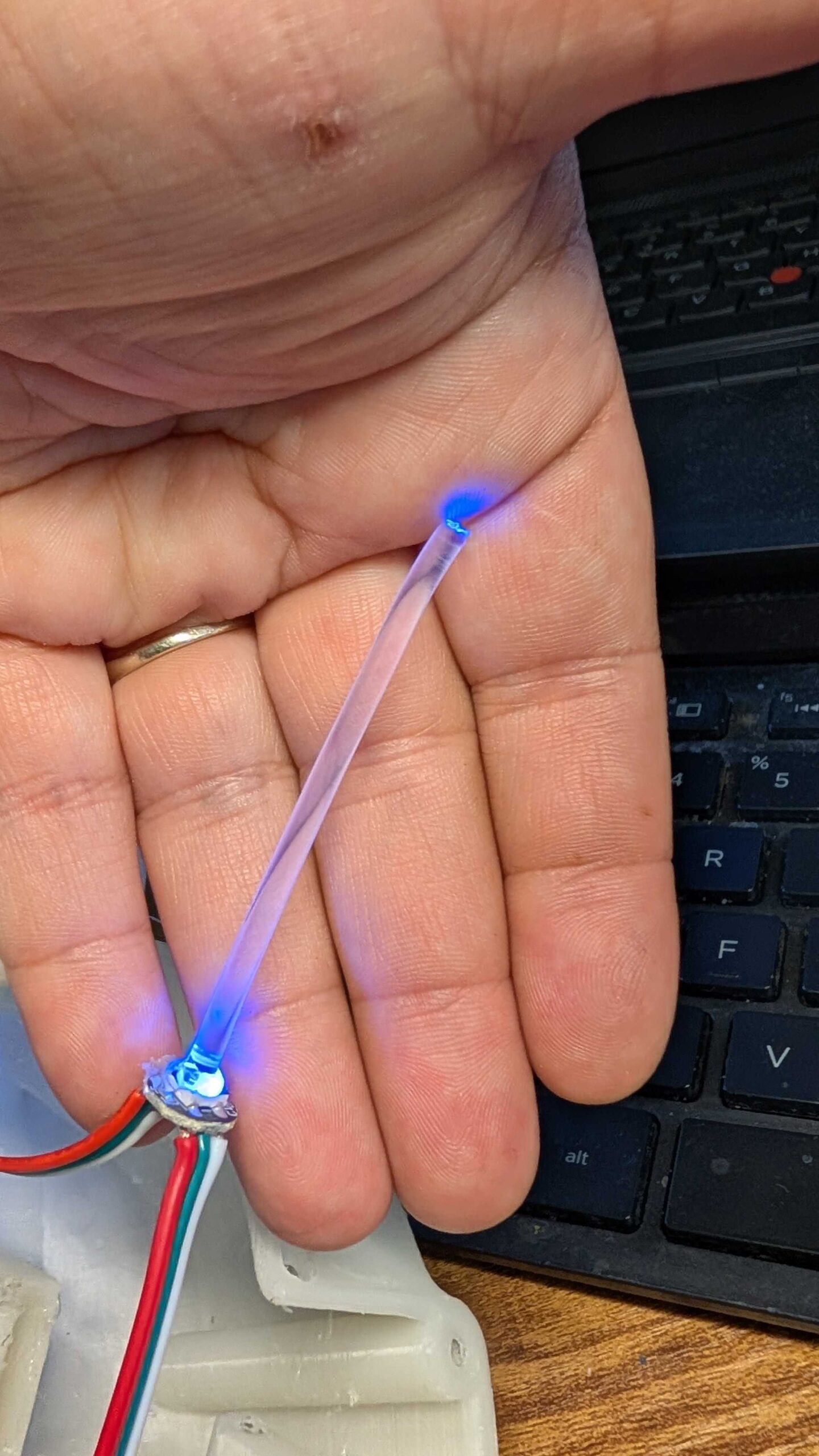
// Spine LEDs & Fiber Optics
WS2812B addressable LEDs feed fiber optic strands throughout the spine, creating smooth, even color diffusion. Replaces four TLC5947 driver boards and hundreds of individual connections, roughly a 90% wiring reduction.
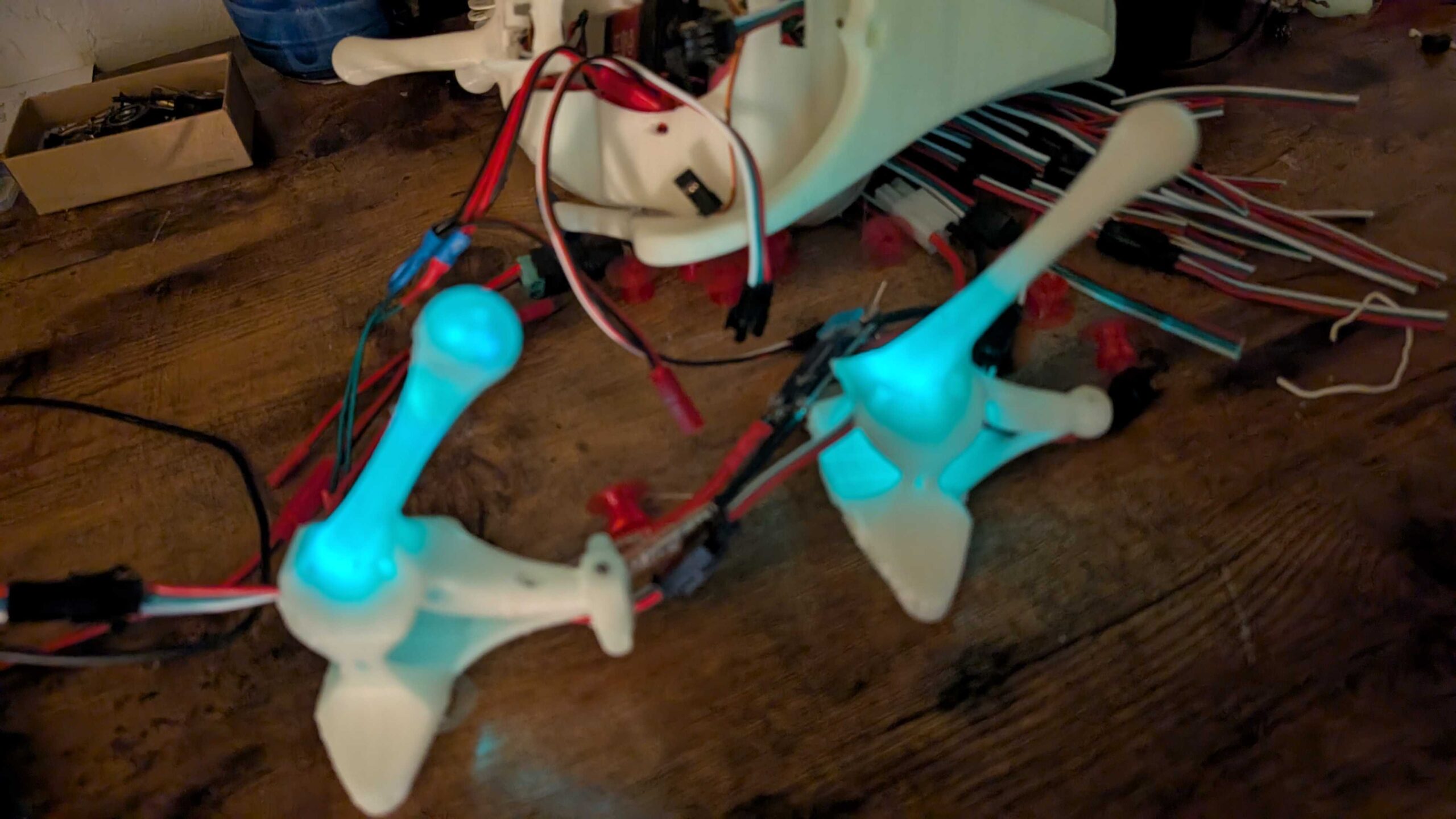
// Gimbal Vertebrae
Glow-in-the-dark PLA vertebrae with gimbal-based connections replace the wire-and-spring system from Iteration 1, eliminating inter-vertebra mechanical connections that resulted in stress fractures over time. The cyan glow shows the new spine during an early electronics test.
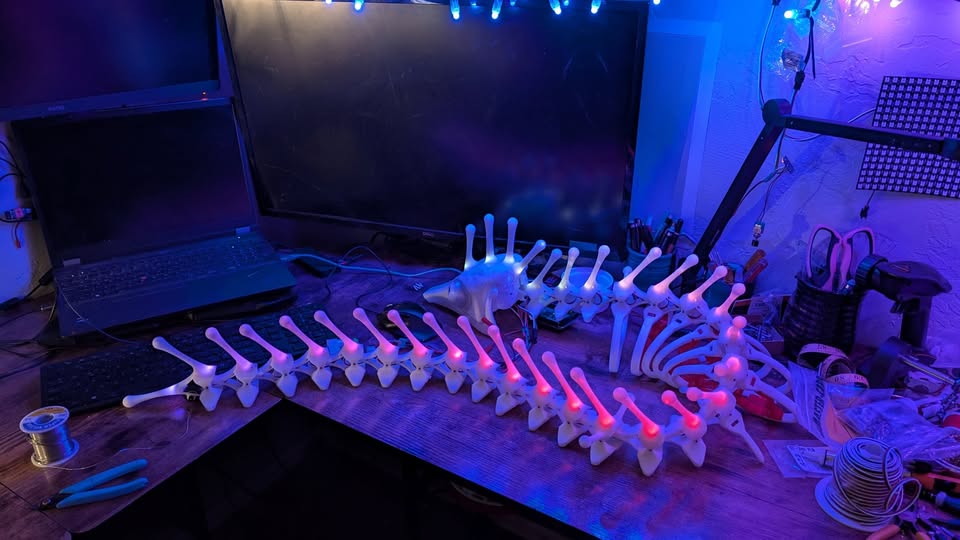
// Full Chassis Assembly
The assembled Iteration 2 chassis during a full LED test, showing the complete spine with pink/red gradient. The new wiring architecture is dramatically cleaner than Iteration 1’s coiled rainbow ribbon harness.
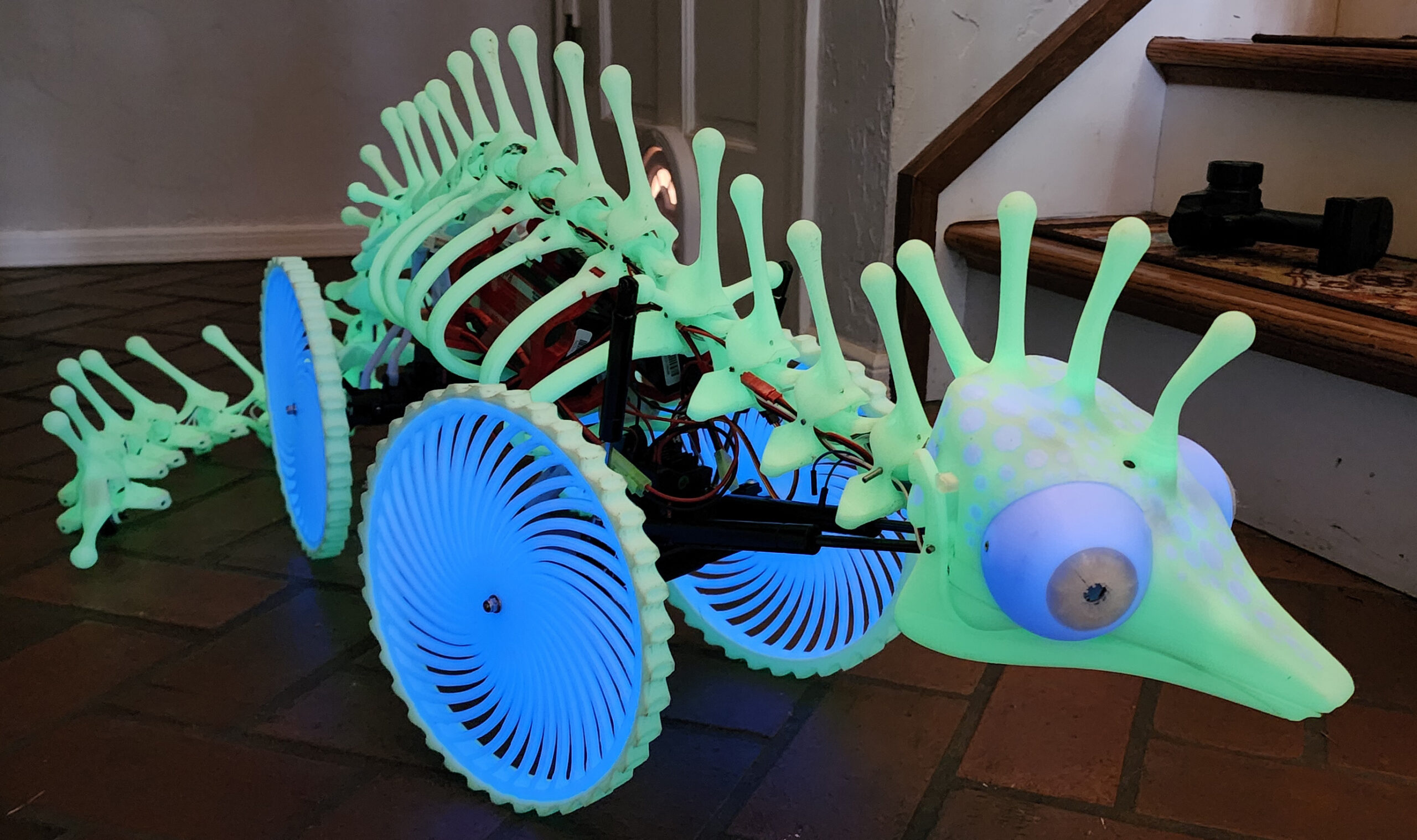
// Finished Chassis
The completed Iteration 2 chassis, fully assembled and glowing. All systems integrated: WS2812B spine LEDs with fiber optics, 2-DOF gimbal eyes with face-following cameras, and RC drivetrain with autonomous control.

// Field Deployment: Wedding
FREDA attended my wedding, fitted with a bubble-gun rig for the occasion. She almost stole the show.
What FREDA Shows
// CAD & Mechanical Design
SolidWorks from scratch. An iguana was chosen for its nearly robotic, deliberate movements, with the intention of adding functional legs in future. Gimbal mechanisms, custom sensor housings, multi-material assemblies. Two full design iterations.
// Electronics & Hardware
Arduino, ESP32S3, PWM LED drivers, servo motor control, power distribution, kit assembly. Redesigned wiring architecture between iterations for roughly 90% complexity reduction.
// Sensing & Signal Processing
IR beacon following with overlap-boundary algorithm. Sharp IR distance sensing for obstacle avoidance and proportional throttle. Heartbeat sensing with LED visualization. Camera-based face detection.
// Creative Engineering
Non-standard design brief with no template. Biological form as engineering constraint. Heartbeat-to-LED mapping. Bubble gun deployment. FREDA demonstrates that rigorous technical work and deliberate absurdity are not mutually exclusive.
// Iteration & Reflection
Completed one full build cycle, identified limitations, and executed a ground-up redesign. Every Iteration 2 decision is traceable to either a specific Iteration 1 lesson or an evolution in personal engineering skills.
// Independent Learning
Self-directed acquisition of SolidWorks, embedded systems, power electronics, and computer vision. Recognized by Prof. Ruzena Bajcsy, a pioneer of robotics research, at UC Berkeley.